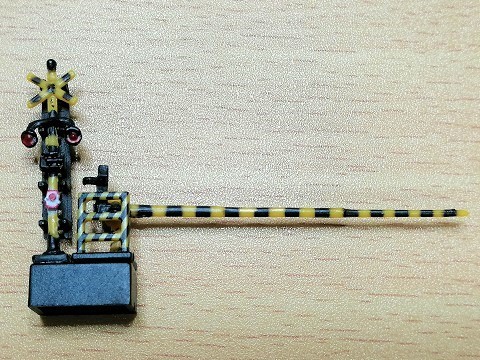
今回は、TOMYTECのジオコレの踏切を改造します。
- LEDの点灯化
- サーボモーターで遮断桿の開閉
ができるようにします。
1.警報灯のLEDの点灯化
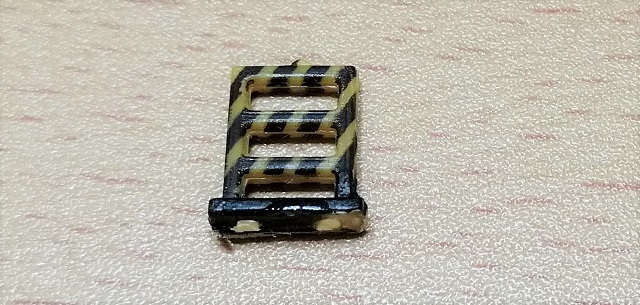
1.遮断桿を外します。次に遮断棒の受け部分を外します。他の方のブログでは土台部分に刺さるようになっている部分を上手に外していますが、当方はできないので根元から写真のように切っています。組み立て直す際に、エポキシ樹脂で付け直します。エポキシ樹脂はダイソーで売っているものを使用しました。

エポキシ樹脂について
エポキシ樹脂は、2つの液を混ぜることで固着する接着剤です。今回のダイソーのエポキシ樹脂は、約10分で硬化するというもので、周囲温度の影響もあると思いますが、約15分くらいである程度位置を決められるようになりました。液の色はほぼ透明です。完全に固着させるには、数時間置いた方が良さそうです。(写真:使いかけですみません!)

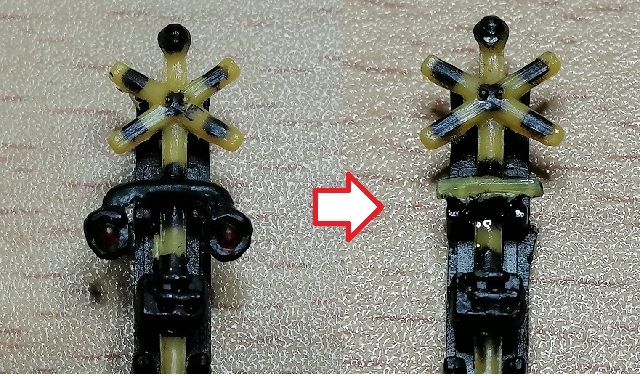
2.次に警報灯部分をニッパーでカットします。左がカット前、右がカット後です。カット部分はヤスリ掛けしています。その後、エタノールを浸み込ませた綿棒で掃除しています。
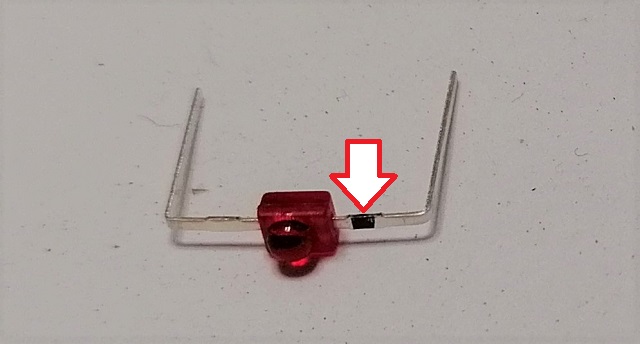
3.LEDを抵抗などのリード線の切れ端に取り付け、はんだ付けします。リード線の切れ端は警報灯のステー替わりになるのと2つのLEDのカソードを電気的に繋ぎます。LEDは、スタンレー電気のLEDを使用しました。黒いマークのある側がGND側(カソード)になります。極性を間違えるとLEDが点灯しないので注意が必要です。

4.もとあった警報灯を外したところに、エポキシ樹脂で固定します。買ったエポキシ樹脂の硬化時間に寄りますが、硬化にしばらく時間がかかります。エポキシ樹脂の粘度が上がってくるまで向きが安定しませんが、我慢します。粘度が上がってきたら位置、向きを調整します。

5.硬化したら、LEDに配線を行います。電線は極細リードワイヤーを使用しました。リード線(GND側)、各LEDの3本はんだ付けを行います。(はんだ付けを素早く行わないと、踏切の樹脂が溶けます。先に電線をはんだ付けした方が無難かもしれません)そのあとLEDの点灯試験を実施します。
6.電線を梯子の間に通します(青で囲ったところ)。そして、土台に穴φ2で開けて裏側へ電線を通します。

7.LEDの周りにドーナツ状の覆いを付けます。ある程度塗装で光漏れを防止できるようですが、当方はワッシャ(M1.6)を使用しました。
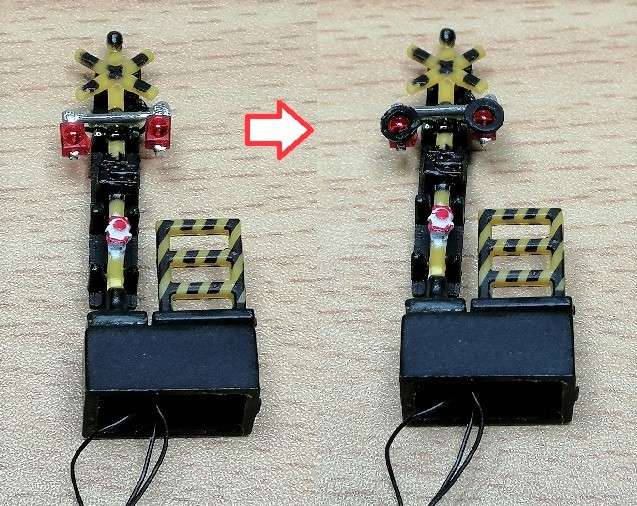
8.艶消しの黒で、LED、リード線等を塗ります。できるだけ光漏れしないように、ちょっと厚塗りになりますが、何度か塗った方が良いようです。これで、警報灯の部分は改造完了です。
9.この次に行う遮断棒を取り付ける際にねじで止めますが、柵が邪魔になるのでこの後カッターで外しました。最後に柵はゴム系の接着剤で取り付けます。
2.遮断棒の改造
1.遮断桿の出っ張り部分をカットして、やすり掛けします。

2.プラ板(t=1mm)を一辺4mmくらいの2等辺三角形にカットしたものを遮断桿の角部分にエポキシ樹脂で固定するのですが、硬化後そのプラ板にφ2mmの穴を開けます。これが上手くいかず苦戦しました。先にφ2mmの穴を開けた後にカットした方が楽です。ちょっと大きくなりがちですが、失敗しない方が良いですね。

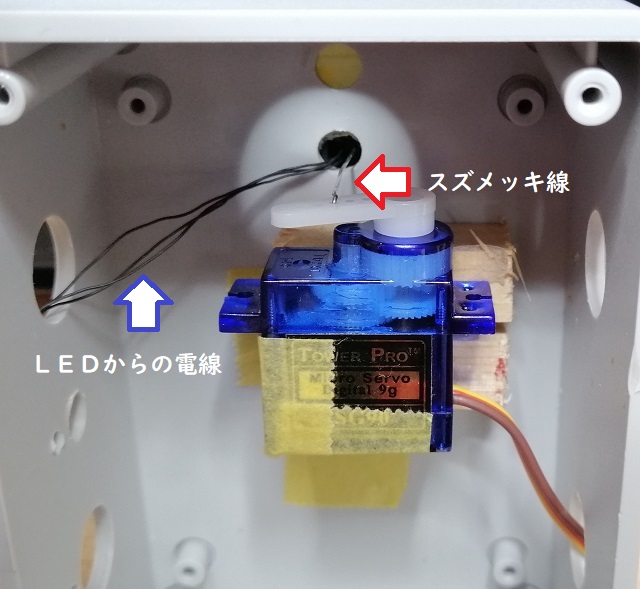
3.もう一つ、サーボモータのホーンとつなぐためのひっかけを付けます。こちらもプラ板で三角形上のものをとりつけます。穴はφ0.5mmで開けました。サーボモータのホーンとスズメッキ線でつなぎます。この穴を大きくし過ぎると遊びが大きくなり、動作がスムースになりにくいようです。エポキシ樹脂が硬化後、艶消しの黒を塗ります。

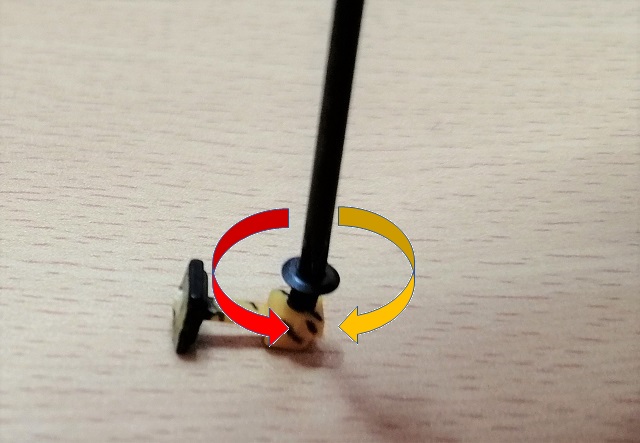
4.遮断桿の受け部分に元の取付穴(非貫通)がありますが、そこにM2X3のネジを入れます。一気に入れずに少し入れては戻しを繰り返します。最後まで入れません(入りません)。多分壊れます。間に遮断桿のプラ板とM2の平ワッシャを入れるので、その分の隙間と若干の余裕があれば良いです。
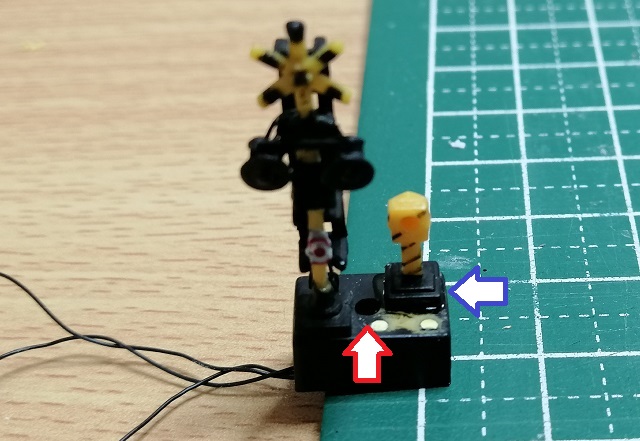
5.サーボモータのホーンとつなぐスズメッキ線を通す穴を開けます。φ2mmの穴を開けました(赤矢印)。開けたら、遮断桿の受け部分をエポキシ樹脂で固定します(青矢印)。このとき垂直、向きを土台に平行になるように取り付けます。傾いて固着すると遮断桿の上げ下げに支障が出たり、線路と平行にならなくなります。固着後、エポキシ樹脂のところを艶消しの黒で塗ります。エポキシ樹脂は光沢があるので隠します。
6.硬化後M2X3のねじとM2平ワッシャで遮断桿をねじ止めします。踏切の土台を貫通している線はスズメッキ線で動作確認用に付けました。

3.遮断桿とサーボモータのホーンとスズメッキ線でつなぐ
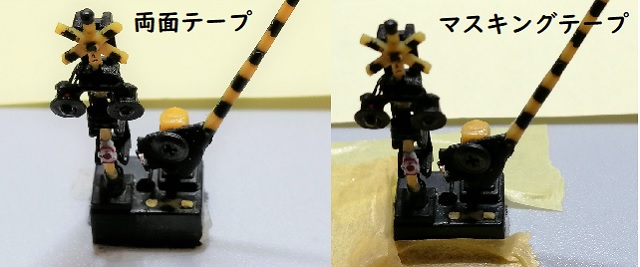
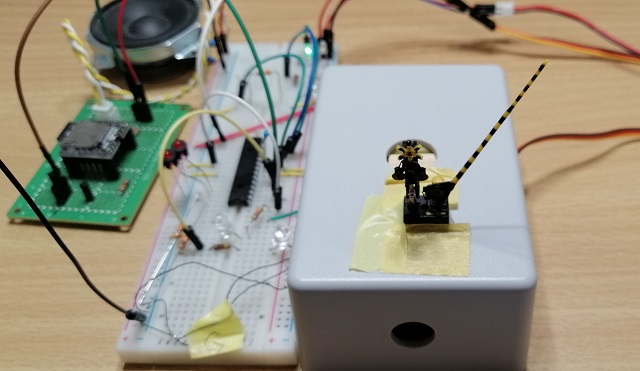
レイアウトに取り付ける訳ではないので、廃品利用のケースに仮固定します。(両面テープとマスキングテープ使用)
ケースの内側はこんな感じです。サーボモーターを直接ケース裏に取り付けるとホーンの角度によってケース裏と干渉するので角棒を切ってかさ上げしています。こちらも両面テープで固定しています。
スケッチの開閉時の指示角度がスズメッキ線の長さ、ホーンの取付角度と絡んできます。遮断桿の開閉角度の真ん中あたりに角度を決め、その位置に来るようにスケッチの角度を決めて、徐々に開く、閉じる方向に広げていくように角度変更していく必要があります。適当にやると開閉の範囲外の角度になり、無理な力が遮断棒のホーンを取り付ける部分に負荷がかかって折角作ったエポキシ樹脂で固定した部分が外れます。(当方やりました)
4.まとめ
これで完成しました。前回からの変更点としてArduino Pro Mini上位互換品からATmega328PのAVRマイコン単体で動くように変更しました。
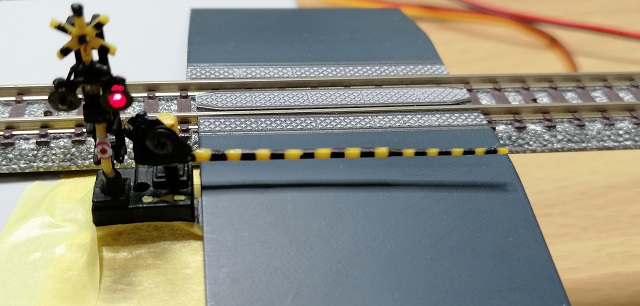
線路とスロープ、踏板を取り付けてみました。かなりいい感じになりました!!
でも柵をまだ取り付けてませんでした。そのうち付けます。
ご覧いただきありがとうございました。次回は、実験レイアウトに組み入れて動作の確認を行いたいと思います。
下に今回の踏切改造動画を作成したので、ちょっと見てやってください。
なお今回使ったもの(購入)のリストです。【】内は、購入先です。踏切を取り付けているケースは、何かに使った廃品利用です。確かラジオデパートの2階で購入したような記憶があります。
- エポキシ樹脂 【ダイソー】
- LED スタンレー電気 BR2222S 【若松通商】(秋葉原)
- 極細リードワイヤー 10m AWG38 【オヤイデ電気】(秋葉原)
- ステンレス(黒染め) (+) スリムヘッド小ねじ M2×3 【ネジ の トミモリ】(ネット)
- ステンレス(黒染め) 丸ワッシャー [ISO小形] M2用 2.2×4.3×0.3 【ネジ の トミモリ】(ネット)
- 鉄/ブラックメッキ 丸ワッシャー [ISO小形] M1.6用 1.7×3.8×0.3 【ネジ の トミモリ】(ネット)


コメント