
今までArduino Pro Mini上位互換で踏切を動かすスケッチ、TOMYTECのジオコレの踏切の改造を行ってきました。前回までは単線の動作確認のみだったので、今回は最終仕様である複線にして動作確認してみます。
動作確認にあたって
- スケッチを複線対応化する。(逆走は考慮しない)
- Arduino Pro Mini上位互換からAVRマイコン単体(ATmega328P)に変更する。
以上の改良を行います。実は前回のサーボモータを使用した遮断桿の投稿の際にAVRマイコン単体使用に対応済で、今回のメインは複線に対応したスケッチを書くことになります。
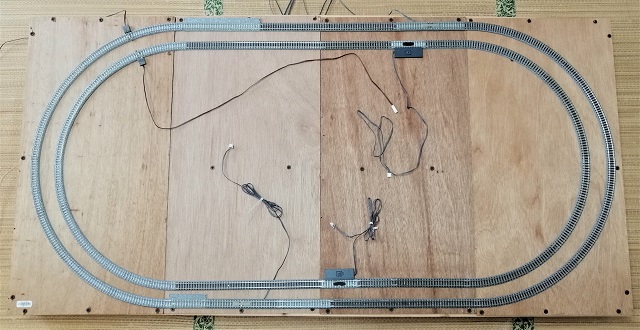
1.実験レイアウトを複線化する
まずは、実験レイアウトを単線から、複線に改修します。
2.複線対応したスケッチにする
今まで作ってきたスケッチを複線対応に書き換えます。2線目(複線追加線用)のセンサーの入力ポート追加。遮断桿を2個対応にします。でもサーボモータが1個しかないので現状1個でしか確認できません。
複線にすると山手線のように外回り、内回りがそれぞれがぐるぐる回ることになるので、踏切の入口、出口センサーを踏むタイミングと踏切区間内の在線の処理をどう行うかが課題になります。この辺りの処理を考えるのが、複線処理の肝になりそうです。
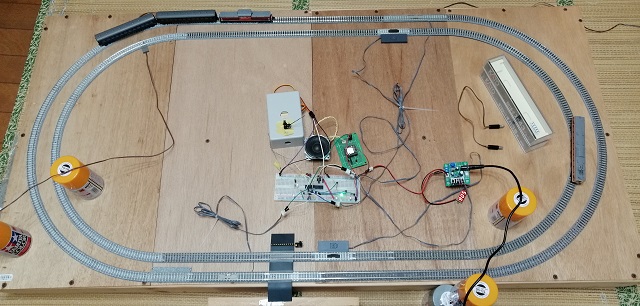
3.実験レイアウトに組み込み試走します。
試行錯誤の末複線のスケッチができました。机上の実験では上手くいっていそうなので早速テスト線に組み込んで実験してみます。
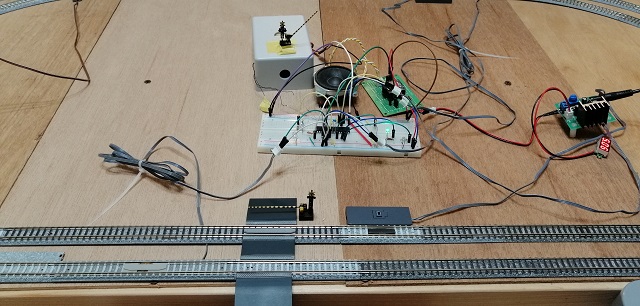
ちょっとアップした写真。いつもながら汚い配線ですみません。
実験線での車両はM車1両での走行が多いのですが、実際に走らせる場合は4~6両になります。そこで1編成の車両数を増やして試してみました。DD51+旧客2両の3両です。
ん!?踏切の出口でセンサーを踏んだ直後に踏切が上がってしまいした。これは重大インシデントになりますね!?これは困りました。
いろいろ調べていたところ「chibiegg研究ノート」さんの【TCSセンサーの使い方】に書かれているプログラムが参考になりました。こちらのチャタリング回避のプログラムを流用させていただいて組み込むことで上手く対応できました。(リンクフリーとなっていたので勝手に貼らせていただきました。問題あればご連絡お願いします)
4.まとめ
ソフト的にはこれで当初想定していた動作ができるものが仕上がりました。例によって言葉と写真ではこういう内容は伝わらないので、動画にして後日アップします。そちらをご覧ください。
あとはTOMYTECの踏切の改造を必要分作り上げることです。今後は、息子が作っているレイアウトは大きくないですが、3ヶ所設置するとのことなのでその分を作りレイアウトに組み込みます。
踏切の回路自体はそんなに複雑ではないですが、ユニバーサル基板で作るとそれなりに大変なので、kicadというフリーのPCB CADで基板データを作成し、オリジナルプリント基板を作りたいと思います。
ご覧いただきありがとうございました。次回は、今言ったkicadでオリジナルプリント基板のデータを作成して発注してみたい思います。


コメント
もこしーさんのブログを見て自分も自動踏切を作ってみたいと考えています。可能でしたら複線化のスケッチと回路図を乗っけてくれませんか?お願いします。
はんぺん様
問い合わせ頂きありがとうございます。返事が遅くなり申し訳ありません。
お問い合わせの件ですが、結論から言うと今のところスケッチ、回路図は載せる予定はありません。ご希望に添えなく申し訳ありません。
理由としては、当方は趣味で行っていて、現状ブログに載せている回路は基本部分のみです。また当方が作るオリジナルプリント基板には、ほとんど保護回路を入れていません。たまに気まぐれでポリスイッチを入れたりしますが、気休め程度です。なので、何かあった際に責任が取れません。
また、スケッチ(プログラム)についても、ここ3年くらい前に始めたばかりで素人です。ブログに載せて恥ずかしい思いもしたくないので、ご勘弁ください。